Embassy on ESP: UART Transmitter
O
I am an 📟 Embedded Engineer with years of experience in both industry 🏭 and academia 🏫. Passionate Mentor 👨💼 and Instructor 👨🏫.
Rustacean 🦀
Search for a command to run...
No comments yet. Be the first to comment.
A community giveaway program by The Embedded Rustacean × Seeed Studio to grow the embedded Rust ecosystem

Introduction Another year comes to an end; as always, it is an opportunity to reflect on the achievements of the past year and look forward to the next. It's been over 3.5 years since I embarked on my embedded Rust journey, and it only gets more exci...
Introduction Another year comes to an end, as such, this is an opportunity to reflect on the achievements of 2024 and look forward to 2025. It's been over 2.5 years since I embarked on my embedded Rust journey, and it remains as exciting as ever. If ...
Introduction 🚀 On Friday, May 17th, 2024, the release of Simplified Embedded Rust was announced marking a new kind of book in the embedded Rust learning space. I'm happy to say that this book, design
This post is the sixth of a multi-part series where I'm exploring the use of Bluetooth Low Energy along embedded Rust on the ESP32. Information in this post might rely on knowledge presented in past p
This blog post is the third of a multi-part series of posts where I will explore various peripherals of the ESP32 using the embedded Rust embassy framework.
Prior posts include (in order of publishing):
Setting up UART serial communication remains useful for several types of device-to-device (point-to-point) communication. One of the common examples is interacting with a host PC. UART implementations are also still found in some industrial and wireless applications. In this post, using embassy and the ESP32C3, I will be configuring and setting up UART communication with a host PC. UART will be configured as a transmitter where the application will detect and send button press counts over the communication channel.
To understand the content of this post, you need the following:
Basic knowledge of coding in Rust.
Knowledge of how the embassy executor works.
Basic knowledge of UART Communication.
All the code presented in this post is available on the apollolabs ESP32C3 git repo. Note that if the code on the git repo is slightly different then it means that it was modified to enhance the code quality or accommodate any HAL/Rust updates.
Additionally, the full project (code and simulation) is available on Wokwi here.
No special connections are required for this implementation. The UART lines on the ESP32-C3 in DevKitM are connected on-board to the UART bridge.
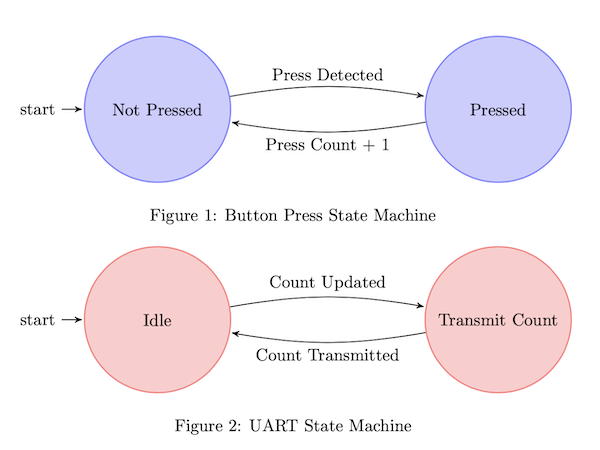
In the application developed in this post, button presses will be detected and counted. The button press count will be sent over UART to the host PC. A button press input will be configured for interrupts and increment a count each time the button is pressed. Consequently, every time a button press is detected the UART interface will transmit the count. The button press logic and the UART logic will each be implemented in their own tasks.
Figure 1 below expresses the states/logic of the button press task. Additionally, Figure 2 expresses the states/logic the UART task will alternate between. The button task will be implemented in the main task. Note that both tasks are being observed as independent each running their own logic. In reality, each will treated by the embassy executor as such. However, the UART task is dependent on a count variable being updated by the button press state machine. For that, we will need to use a special abstraction that allows safe exchange of data among tasks.
Let's now jump into implementing this algorithm.
In this implementation the crates required are as follows:
The embassy_sync crate to import Signal, a special abstraction needed for synchronization.
The embassy_executor crate to import the embassy executor.
The embedded-hal-async crate to import the GPIO abstractions to detect button presses.
The esp32c3-hal crate to import the needed ESP32C3 abstractions.
The esp_backtrace crate needed to define panic behavior.
use embassy_executor::Spawner;
use embassy_sync::blocking_mutex::raw::CriticalSectionRawMutex;
use embassy_sync::signal::Signal;
use embedded_hal_async::digital::Wait;
use esp32c3_hal::{
clock::ClockControl,
embassy, interrupt,
peripherals::{Interrupt, Peripherals, UART0},
prelude::*,
Uart, UartTx, IO,
};
use esp_backtrace as _;
In the application at hand, there will be two tasks that share a count value. The button press detection task will increment a count the UART writer task will use it. As such, we can create a global variable MYSIGNAL to "signal" the count value that is going to be passed around. We declare MYSIGNAL as static and define it as follows:
static MYSIGNAL: Signal<CriticalSectionRawMutex, u32> = Signal::new();
📝 Note: Global variables shared among tasks in Rust is a very sticky topic. This is because sharing global data is
unsafesince it can cause race conditions. You can read more about it here. Embassy offers several synchronization primitives that provide safe abstractions depending on what needs to be accomplished. There is a prior post where I go into detail about these primitives here.
The UART writer task is expected to accept a UART instance as input and loop constantly check/await if MYSIGNAL gets updated. Though ahead of the loop it might be beneficial to indicate that the task has started. These are the required steps:
1️⃣ Create a UART Writer Task: Tasks are marked by the #[embassy_executor::task] macro followed by a async function implementation. The task created is referred to as uart_writer task defined as follows:
#[embassy_executor::task]
async fn uart_writer(mut tx: UartTx<'static, UART0>)
UartTx marks a UART transmitted type that is configured with an instance of UART0. This means when spawning the task, we need pass a handle for a UART transmitter configured with an instance of UART0. This will be done in the main task before spawning the uart_writer task.
2️⃣ Print a Message: As part of the embedded_io_async crate we can use the write implementation in the Write trait to asynchronously write a message. write has the following signature:
async fn write(&mut self, buf: &[u8]) -> Result<usize, Self::Error>
As such, we need to pass a mutable reference of a type (UartTx in our case) that implements Write and our message as a slice of u8. Since write is an async function, the program needs to await for the write operation to complete. This results in the following code:
embedded_io_async::Write::write(
&mut tx,
b"UART Task Spawned. Waiting for Button Press...\r\n",
)
.await
.unwrap();
📝 Note: I could have easily also used
esp_printlnwhich provides more convenient abstractions to print to the console. While in this context it does not make much difference, I did this for two reasons. First, since this is a UART example, we need to demonstrate how to use UART abstractions. Second, the previous code is a good demonstration of the use of theembedded-io-asynctraits. Using theembedded-io-asynctraits allows for more portable code in some contexts.
3️⃣ Define the task loop: Next enter the task loop. The first thing we need to do is await a change on MYSIGNAL. For that, there exists a wait method for the Signal type. wait_for_rising_edge is an async function that resolves into a Future if its waiting on a signal. Once the Future resolves, we get back a value corresponding to the press_count. We then print the press_count:
loop {
let press_count = MYSIGNAL.wait().await;
esp_println::println!("Button Pressed {} time(s)", press_count);
}
The start of the main task is marked by the following code:
#[main]
async fn main(spawner: Spawner)
As the documentation states: "The main entry point of an Embassy application is defined using the #[main] macro. The entry point is also required to take a Spawner argument." As we'll see, Spawner is what will allow us to spawn or kick-off the button_press task.
The following steps will mark the tasks performed in the main task.
1️⃣ Obtain a handle for the device peripherals & system clocks: In embedded Rust, as part of the singleton design pattern, we first have to take the PAC-level device peripherals. This is done using the take() method. Here I create a device peripheral handler named peripherals , a system peripheral handler system, and a system clock handler clocks as follows:
let peripherals = Peripherals::take();
let system = peripherals.SYSTEM.split();
let clocks = ClockControl::boot_defaults(system.clock_control).freeze();
2️⃣ Initialize Embassy Timers for the ESP32C3:
In embassy, there exists an init function that takes two parameters. The first is system clocks and the second is an instance of a timer. Under the hood, what this function does is initialize the embassy timers. As such, we can initialize the embassy timers as follows:
embassy::init(
&clocks,
esp32c3_hal::timer::TimerGroup::new(peripherals.TIMG0, &clocks).timer0,
);
📝 Note: At the time of writing this post, I couldn't really locate the
initfunction docs.rs documentation. It didn't seem easily accessible through any of the current HAL implementation documentation. Nevertheless, I reached the signature of the function through the source here.
3️⃣ Instantiate and Create Handle for IO: We need to configure the LED pins as a push-pull output and obtain a handler for the pin so that we can control it. Similarly, we need to obtain a handle for the button input pin. Before we can obtain any handles for the LEDs and the button we need to create an IO struct instance. The IO struct instance provides a HAL-designed struct that gives us access to all gpio pins thus enabling us to create handles for individual pins. This is similar to the concept of a split method used in other HALs (more detail here). We do this by calling the new() instance method on the IO struct as follows:
let io = IO::new(peripherals.GPIO, peripherals.IO_MUX);
Note how the new method requires passing the GPIO and IO_MUX peripherals.
4️⃣ Obtain a handle and configure the input button: The push button is connected to pin 2 (gpio2) as stated earlier. Additionally, in the pressed state, the button pulls to ground. Consequently, for the button unpressed state, a pull-up resistor needs to be included so the pin goes high. An internal pull-up can be configured for the pin using the into_pull_up_input() method as follows:
let mut button = io.pins.gpio2.into_pull_up_input();
5️⃣ Obtain Handle and Configure UART: to create an instance of UART0, there exists a new instance method under esp32c3_hal::Uart that requires two parameters; a UART peripheral type and a Clocks type. Since we need only an instance of a UART transmitted, there also exists a split method that allows us to "split" the uart0 instance into separate transmitter and receiver instances. split returns a tuple with two instances. Since we don't need the receiver instance an underscore _ is used.
let uart0 = Uart::new(peripherals.UART0, &clocks);
let (tx, _) = uart0.split();
UART0 is chosen since it is the one that ties to the UART logging pins on board. Additionally, new configures UART with the default 8N1 setup.
6️⃣ Enable GPIO Interrupts: At this point, the button instance is just an input pin. In order to make the device respond to push button events, interrupts need to be enabled for button. This results in the following lines of code:
esp32c3_hal::interrupt::enable(
esp32c3_hal::peripherals::Interrupt::GPIO,
esp32c3_hal::interrupt::Priority::Priority1,
)
4️⃣ Spawn UART Writer Task: before entering the button press loop, we're going to need to kick off our uart_writer task. This is done using the spawn method as follows:
spawner.spawn(uart_writer(tx)).unwrap();
Next, we can move on to the task loop.
Following the design described earlier, in the main task (button press task), we will await a button press to occur. Once a press has occurred, press_count is incremented and signaled. Here's the code:
let mut press_count = 0;
loop {
// Await Button Press
button.wait_for_rising_edge().await.unwrap();
// Increment Count
press_count += 1;
// Signal Press Count
MYSIGNAL.signal(press_count);
}
Note here the use of the signal method on MYSIGNAL to update its value and "signal" it to the uart_writer task.
This concludes the code for the full application.
Here is the full code for the implementation described in this post. You can additionally find the full project and others available on the apollolabs ESP32C3 git repo. Also, the Wokwi project can be accessed here.
#![no_std]
#![no_main]
#![feature(type_alias_impl_trait)]
use embassy_executor::Spawner;
use embassy_sync::blocking_mutex::raw::CriticalSectionRawMutex;
use embassy_sync::signal::Signal;
use embedded_hal_async::digital::Wait;
use esp32c3_hal::{
clock::ClockControl,
embassy, interrupt,
peripherals::{Interrupt, Peripherals, UART0},
prelude::*,
Uart, UartTx, IO,
};
use esp_backtrace as _;
static MYSIGNAL: Signal<CriticalSectionRawMutex, u32> = Signal::new();
#[embassy_executor::task]
async fn uart_writer(mut tx: UartTx<'static, UART0>) {
embedded_io_async::Write::write(
&mut tx,
b"UART Task Spawned. Waiting for Button Press...\r\n",
)
.await
.unwrap();
loop {
let press_count = MYSIGNAL.wait().await;
esp_println::println!("Button Pressed {} time(s)", press_count);
}
}
#[main]
async fn main(spawner: Spawner) {
let peripherals = Peripherals::take();
let system = peripherals.SYSTEM.split();
let clocks = ClockControl::boot_defaults(system.clock_control).freeze();
// Initilize Embassy Timers
embassy::init(
&clocks,
esp32c3_hal::timer::TimerGroup::new(peripherals.TIMG0, &clocks).timer0,
);
// Configure UART
let uart0 = Uart::new(peripherals.UART0, &clocks);
let (tx, _) = uart0.split();
// Configure GPIO
let io = IO::new(peripherals.GPIO, peripherals.IO_MUX);
let mut button = io.pins.gpio2.into_pull_up_input();
// Enable Interrupts for GPIO
interrupt::enable(Interrupt::GPIO, interrupt::Priority::Priority1).unwrap();
spawner.spawn(uart_writer(tx)).ok();
let mut press_count = 0;
loop {
// Detect and Count Button Presses
button.wait_for_rising_edge().await.unwrap();
press_count += 1;
// Signal Press Count
MYSIGNAL.signal(press_count);
}
}
In this post, a UART application transmitting to a host was created for the ESP32C3 microcontroller. The code combined the use of Signals, GPIO, and interrupts with the embassy async framework. Have any questions? Share your thoughts in the comments below 👇.
