STM32F4 Embedded Rust at the HAL: GPIO Interrupts

O
I am an 📟 Embedded Engineer with years of experience in both industry 🏭 and academia 🏫. Passionate Mentor 👨💼 and Instructor 👨🏫.
Rustacean 🦀
Search for a command to run...
No comments yet. Be the first to comment.
Learn Rust at the HAL level with the STM32F4 microcontroller.
This blog post is the second of a three-part series of posts where I explore interrupts for the STM32F401RE microcontroller using embedded Rust at the HAL level. As a word of note, this post heavily
A community giveaway program by The Embedded Rustacean × Seeed Studio to grow the embedded Rust ecosystem

Introduction Another year comes to an end; as always, it is an opportunity to reflect on the achievements of the past year and look forward to the next. It's been over 3.5 years since I embarked on my embedded Rust journey, and it only gets more exci...
Introduction Another year comes to an end, as such, this is an opportunity to reflect on the achievements of 2024 and look forward to 2025. It's been over 2.5 years since I embarked on my embedded Rust journey, and it remains as exciting as ever. If ...
Introduction 🚀 On Friday, May 17th, 2024, the release of Simplified Embedded Rust was announced marking a new kind of book in the embedded Rust learning space. I'm happy to say that this book, design
This post is the sixth of a multi-part series where I'm exploring the use of Bluetooth Low Energy along embedded Rust on the ESP32. Information in this post might rely on knowledge presented in past p
This blog post is the first one of a three-part series of posts where I explore interrupts for the STM32F401RE microcontroller using embedded Rust at the HAL level.
Dealing with interrupts on its own from an embedded microcontroller perspective is more complex than polled code. As if that weren't enough, I would say the use of Rust adds another level of complexity. This is understandable because interrupts are not safe by definition since they introduce race conditions. As a result, Rust being Rust, adds abstractions to make interrupt operations safe and prevent these race conditions. These additional abstractions might not be easy to digest for a beginner. Still, the good news is that there is an alternative out there to make using Rust with interrupts smoother. This alternative is the Real-Time Interrupt-driven Concurrency (RTIC) framework which I will be tackling it in a future post.
In this post, I will be refactoring the GPIO button-controlled blinking application I created before and transforming it to use interrupts. I will be sticking strictly to the HAL. Along the way, I will try my best to explain the elements introduced by Rust. Additionally, I will be evolving the application over three separate posts, finishing up with the RTIC, which I will explain in more detail in the software design section.
To understand the content of this post, you need the following:
All the code presented in this post in addition to instructions for the environment and toolchain setup are available on the The Embedded Rustacean STM32F4 git repo. Note that if the code on the git repo is slightly different then it means that it was modified to enhance the code quality or accommodate any HAL/Rust updates.
There will be no need for external connections. On-board connections will be utilized and the include the following:
In the application developed in this post, I want to cycle through several LED blinking frequencies based on a button press. Meaning, that every time I press the on-board button, I want to see the LED turning on and off at a different rate. In this section, I will focus on the design of the application algorithm itself rather than the configuration aspects. For algorithm design purposes, I will assume that interrupts are configured already. I will be detailing the configuration steps in the implementation section.
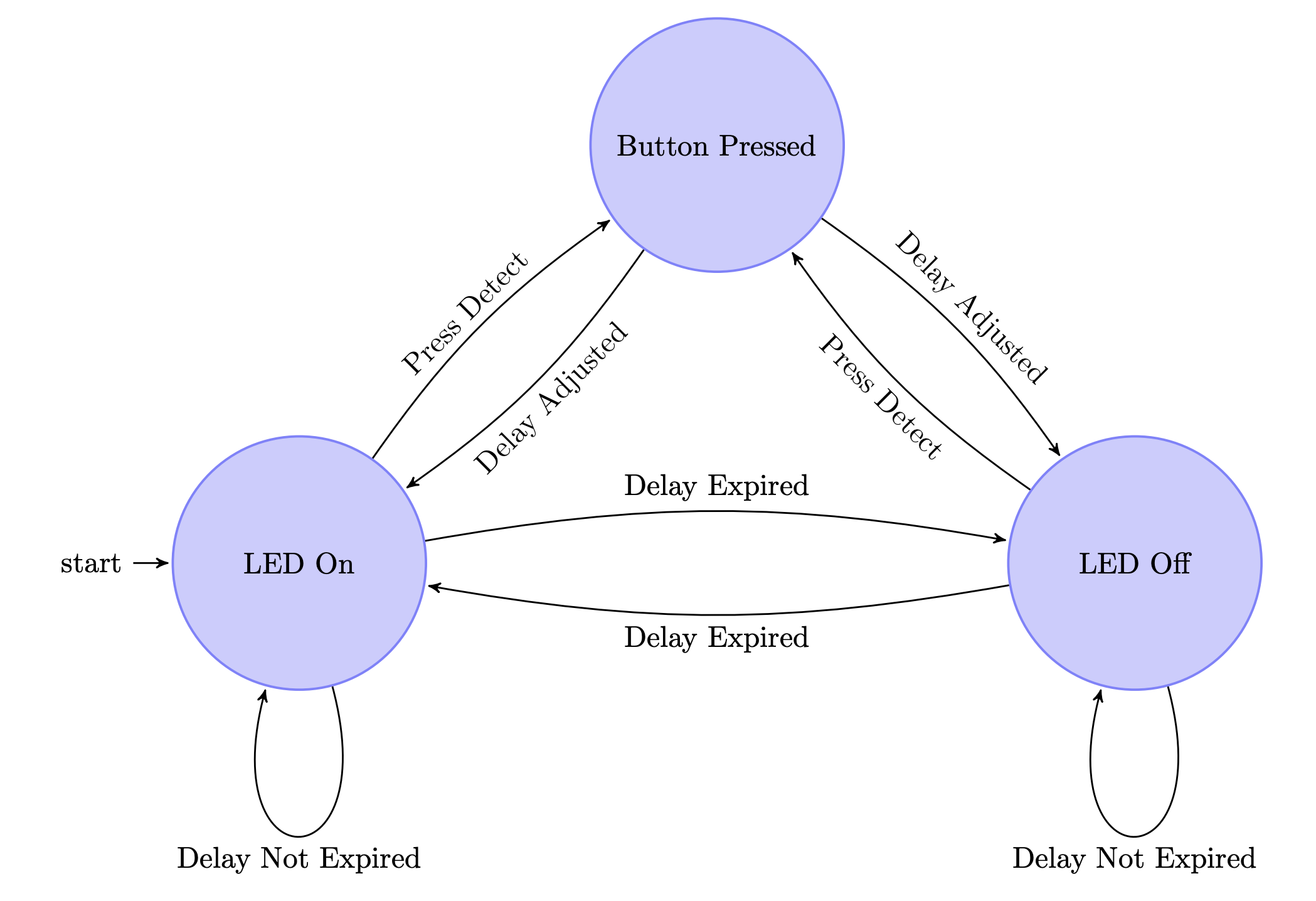
I've decided it would be best to represent the algorithm using a state machine. Here's one possible approach:
📝 Note
Although I use state machine representation. I will not be encoding any states in the code. Additionally, the representation assumes that configuration is already completed.
Let's analyze what is happening here. The application will start in a state where the LED is turned on. In this state, a timer would also be started. While in the "LED on" state two events could happen to make the system transition to another state; either a button press or a timer delay expiration. If the delay expires the application would transition to an "LED off" state that turns off the LED and resets the delay timer. On the other hand, if a button press is detected the application would transition to a "Button Pressed" state. The "Button Pressed" state would in turn adjust the amount of timer delay and then return to the state it transitioned from. The "LED off" state has exactly the same transition conditions as the "LED on" state.
In essence, interrupts are software routines that are triggered by hardware events. As such, this application can be programmed to run entirely on interrupts. This means that both hardware events causing transitions (button press and timer expiry) can be configured with interrupts. However, I won't be doing that all at once. Instead, I will be doing two separate steps, each in a separate post, as follows:
The idea behind the separation is not to introduce much all at once. Especially since interrupt configuration methods for GPIO are slightly different than the ones for timers. Additionally, as an extra step, in a third post, I will also transfer the whole application to the RTIC framework. This will show how it would be smoother (and less verbose) to use the RTIC framework instead if one would want to integrate interrupts in their application.
Let's now jump into implementing this algorithm.
Before jumping in, I'd like to provide some context on what needs to be done for configuring interrupts in hardware and software. The hardware part is more or less the same across controllers that use a certain architecture (ex. ARM). For ARM-based controllers (the STM32F401RE being one) typically the following steps need to be done:
After that, one would need to define an Interrupt Service Routine (ISR) in the application code. As one would expect, the ISR contains the code executed in response to a specific interrupt event. Additionally, inside the ISR, it is typical that one would use values that are shared with the main routine. Also in the ISR, one would have to clear the hardware pending interrupt flag to allow consecutive interrupts to happen. This is a bit of a challenge in Rust for two reasons; First, to clear the pending flag one would need to access the peripheral through its handle. This is an issue because if you recall, Rust follows a singleton pattern and we cannot have more than one reference to a peripheral. Second, in Rust, global mutable variables, rightly so, are considered unsafe to read or write. This is because without taking special care, a race condition might be triggered. To solve both challenges, in Rust, global mutable data and peripherals need to be wrapped in safe abstractions that allow them to be shared between the ISR and the main thread. Enough explanations, lets move on to the actual code.
In this implementation the crates required are as follows:
core crate to import the Cell and RefCell pointer constructs.cortex_m crate to import the Mutex construct.cortex_m_rt crate for startup code and minimal runtime for Cortex-M microcontrollers.panic_halt crate to define the panicking behavior to halt on panic.stm32f4xx_hal crate to import the STMicro STM32F4 series microcontrollers device hardware abstractions on top of the peripheral access API.use core::cell::{Cell, RefCell};
use cortex_m::interrupt::Mutex;
use cortex_m_rt::entry;
use panic_halt as _;
use stm32f4xx_hal::{
gpio::{self, Edge, Input},
pac::{self, interrupt},
prelude::*,
};
In the application at hand, I'm choosing to enable interrupts for the GPIO peripheral to detect a button press. As such, I would need to create a global shared variable to access the GPIO peripheral (remember singleton pattern). This is because I would need to subsequently disable the interrupt pending flag in the ISR. In particular, I will be using PC13 as the GPIO input pin that I want to enable interrupts for. For convenience, I first create an alias for the PC13 pin as follows:
type ButtonPin = gpio::PC13<Input>;
Next I create a static global variable called G_BUTTON wrapping ButtonPin in a safe abstraction as follows:
static G_BUTTON: Mutex<RefCell<Option<ButtonPin>>> = Mutex::new(RefCell::new(None));
So here the peripheral is wrapped in an Option that is wrapped in a RefCell, that is wrapped in a Mutex. The Mutex makes sure that the peripheral can be safely shared among threads. It would require that we use a critical section to be able to access the peripheral. The RefCell is used to be able obtain a mutable reference to the peripheral. Finally, the Option is used to allow for lazy initialization as one would not be able to initialize the variable until later (after I configure the GPIO button).
Next I create a global variable G_DELAYMS to carry the delay value that I'm going to pass around for determining the blinking delay. This is a variable that will be used by the main thread and modified by the ISR. I initialize the delay to 2000_u32 which will correspond to two seconds.
static G_DELAYMS: Mutex<Cell<u32>> = Mutex::new(Cell::new(2000_u32));
Note two differences here from the peripheral global variable. First, I am not using an Option since I am directly initializing with a value. Second, I am using a Cell rather than a RefCell. This is because Cell only permits taking a copy of the current value or replacing it, not taking a reference which is not needed with a u32.
📝 Notes:
1️⃣ These global variables can be viewed as entities that exist in a global context where access is obtained at runtime by the thread that needs them. This is why
RefCellis needed. Compared to aBox,RefCellallows for checking during runtime that only one mutable reference exists to a variable. ABoxmakes sure statically at compile time that only one mutable reference exists. ObviouslyBoxcannot be used with interrupts as multiple threads would require mutable access during runtime.
2️⃣ I would strongly recommend referring to Chapter 6 of the Embedded Rust Book for more detail on this topic.
1️⃣ Obtain a handle for the device peripherals: In embedded Rust, as part of the singleton design pattern, we first have to take the PAC level device peripherals. This is done using the take() method. Here I create a device peripheral handler named dp as follows:
let mut dp = pac::Peripherals::take().unwrap();
2️⃣ Promote the PAC-level GPIO structs: We need to configure the LED pin as a push-pull output and obtain a handler for the pin so that we can control it. We also need to obtain a handle for the button input pin. According to the connection details, the LED pin connection is part of GPIOA and the button connection is part of GPIOC. Before we can obtain any handles for the LED and the button we need to promote the pac-level GPIOA and GPIOC structs to be able to create handles for individual pins. We do this by using the split() method as follows:
let gpioa = dp.GPIOA.split();
let gpioc = dp.GPIOC.split();
3️⃣ Obtain a handle for the LED and configure it to an output: As earlier stated, the on-board LED on the Nucleo-F401RE is connected to pin PA5 (Pin 5 Port A). As such, we need to create a handle for the LED pin that has PA5 configured to a push-pull output using the into_push_pull_output() method. We will name the handle led and configure it as follows:
let mut led = gpioa.pa5.into_push_pull_output();
For those interested, this HAL documentation page has the full list of methods that the Pin type supports. Also, if you find the split() method confusing, please refer to my blog post here for more detail.
4️⃣ Obtain a handle and configure the input button: The on-board user push button on the Nucleo-F401RE is connected to pin PC13 (Pin 13 Port C) as stated earlier. Pins are configured to an input by default so when creating the handle for the button we don't call any special methods.
let mut button = gpioc.pc13;
1️⃣ Configure the system clocks: The system clocks need to be configured as they are needed in setting up the timer peripheral. To set up the system clocks we need to first promote the RCC struct from the PAC and constrain it using the constrain() method (more detail on the constrain method here) to give use access to the cfgr struct. After that, we create a clocks handle that provides access to the configured (and frozen) system clocks. The clocks are configured to use an HSE frequency of 8MHz by applying the use_hse() method to the cfgr struct. The HSE frequency is defined by the reference manual of the Nucleo-F401RE development board. Finally, the freeze() method is applied to the cfgr struct to freeze the clock configuration. Note that freezing the clocks is a protection mechanism by the HAL to avoid the clock configuration changing during runtime. It follows that the peripherals that require clock information would only accept a frozen Clocks configuration struct.
let rcc = dp.RCC.constrain();
let clocks = rcc.cfgr.use_hse(8.MHz()).freeze();
2️⃣ Obtain a handle for the delay: I'll be using TIM1 to create a delay handle as follows:
let mut delay = dp.TIM1.delay_ms(&clocks);
The last thing that remains in the configuration is to configure and enable interrupt operation for the GPIO button peripheral. This is so that when a button is pressed, execution switches over to the interrupt service routine. As mentioned earlier we need to configure the hardware in three steps:
1️⃣ Enable global interrupts at the Cortex-M processor level: Cortex-M processors have an architectural register named PRIMASK that contains a bit to enable/disable interrupts globally. Note that interrupts are globally enabled by default in the Cortex-M PRIMASK register. Technically nothing needs to be done here from a code perspective, however I like to include this step for awareness.
2️⃣ Set up and enable interrupts at the peripheral level (Ex. GPIO or ADC): To set up the interrupts for GPIO we need access to the SYSCFG struct. In order to be able to use the SYSCFG struct, we first need to first promote it to the HAL level by constraining it using the constrain() method. How did I know that I need to constrain SYSCFG? I recommend you refer to this post for more detail. SYSCFG contains the information for a set of registers in the STM32 that are needed to configure interrupts for peripherals and promoted as follows:
let mut syscfg = dp.SYSCFG.constrain();
Now the gpio button needs to be configured as an interrupt source in the STM32 device. In the STM32, GPIO interrupts are considered a type of external interrupt. In the stm32f4xx-hal documentation for GPIO I've found a bunch of external pin ExtiPin traits that would allow me to configure GPIO pin interrupts. As such, the GPIO pin is set up first by using the make_interrupt_source method to make it an interrupt source in the STM32 device. The make_interrupt_source method has the below signature, of which all it needs is a mutable reference to SysCfg.
fn make_interrupt_source(&mut self, syscfg: &mut SysCfg)
Next, we would need to determine how the interrupt triggers (Ex. on a rising, falling, or both edges). Under the same list of ExtiPin traits, there is a trigger_on_edge method with the following signature:
fn trigger_on_edge(&mut self, exti: &mut EXTI, level: Edge)
The method requires two parameters, a mutable reference to the pac external interrupt/event controller EXTI, and the interrupt trigger level. Edge is an enumeration with the different types of interrupt triggers for GPIO and looks as follows:
pub enum Edge {
Rising,
Falling,
RisingFalling,
}
Finally, one more step remains which is enabling the interrupt at the peripheral level. This is done via the enable_interrupt method:
fn enable_interrupt(&mut self, exti: &mut EXTI)
Here the method only requires a mutable reference to the pac external interrupt/event controller EXTI.
Using the above methods, the GPIO button pin can now be configured for an interrupt as follows:
button.make_interrupt_source(&mut syscfg);
button.trigger_on_edge(&mut dp.EXTI, Edge::Rising);
button.enable_interrupt(&mut dp.EXTI);
3️⃣ Enable interrupt source in the NVIC: Now that the button interrupt is configured, the corresponding interrupt number in the NVIC needs to be unmasked. This is done using the NVIC unmask method in the cotrex_m::peripheral crate. Also it must be noted that unmasking interrupts in the NVIC is considered unsafe in Rust. However, in this case it's fine since we know that we aren't doing any unsafe behavior. The unmask method expects that we pass it the number for the interrupt that we want to unmask. This could be done by applying the generic Pin interrupt method on the button handle as follows:
unsafe {
cortex_m::peripheral::NVIC::unmask(button.interrupt());
}
An alternative approach is to leverage the interrupt enum that enumerates all the interrupts in the stm32f4xx-hal. You would need to find out what the button interrupt source name is in the STM32 by looking into the reference manual. It would turn out that the interrupt name is EXTI15_10. As such, the interrupt can be also unmasked in the NVIC as follows:
unsafe {
cortex_m::peripheral::NVIC::unmask(stm32f4xx_hal::interrupt::EXTI15_10);
}
🚨 Important Note:
During the implementation of this project I kept getting a
the trait 'Nr' is not implemented for 'stm32f4xx_hal:: interrupttype error from the compiler for the above line. It turns out that the crate cortex-m 0.7 started using traitInterruptNumberfor interrupts instead ofNrfrombare-metal. To get rid of this issue, you need to make sure that the version of thecortex-mthe hal you are using imports is the same as the one in yourcargo.toml.
4️⃣ Move Button to Global Context: Recall how earlier a global variable G_BUTTON was introduced to move around the GPIO peripheral between contexts. However, G_BUTTON was initialized with None pending the configuration of the GPIO button that is now available. This means that we can now move button to the global context in which it can be shared by threads. This is done as follows:
cortex_m::interrupt::free(|cs| {
G_BUTTON.borrow(cs).replace(Some(button));
});
Here we are introducing a critical section of code enclosed in the closure cortex_m::interrupt::free. In this critical section of code, preemption from interrupts is disabled to ensure that the accessing the global variable does not introduce any race conditions. This is required because G_BUTTON is wrapped in a Mutex. The closure passes a token cs that allows us to borrow a mutable reference the global variable and replace the Option inside of with Some(button).
Note that from this point on in code, every time we want to access G_BUTTON (or any other Mutex global variable we would need to introduce a critical section using cortex_m::interrupt::free.
This was a lot, though its over and we can move on to the application code.
Following the design described earlier in the state machine, the button press will be the only event that is interrupt based. Meaning that the delay expiry events will be managed in the application loop. Consequently, in the application loop, all I will be doing is switching between the "LED on" and "LED off" states with a delay in between them. However, the delay value would depend on the value in G_DELAYMS that exists in the global context. G_DELAYMS is modified by the ISR overtime a button press is detected.
In the application loop, I switch between the "LED on" and "LED off" states using the set_high() and set_low() Pin methods. In between the "LED on" and "LED off" states, a delay is required which I used the delay handle I created earlier. In order to obtain access to G_DELAYMS I would need to introduce a critical section as done earlier since it's wrapped in a Mutex. Inside the critical section, I obtain access by borrowing G_DELAYMS using the borrow method and then get its value using the get method. The application loop code looks as follows:
loop {
led.set_high();
delay.delay_ms(cortex_m::interrupt::free(|cs| G_DELAYMS.borrow(cs).get()));
led.set_low();
delay.delay_ms(cortex_m::interrupt::free(|cs| G_DELAYMS.borrow(cs).get()));
}
Next, I need to setup the ISR that would include the code the executes once the interrupt is detected. To define the interrupt in Rust, first one would need to use the #[interrupt] attribute, followed by a function definition that has the interrupt name as an identifier. The interrupt name is obtained from the hal documentation and in our case for the pin PC13 its EXTI15_10. This looks as follows:
#[interrupt]
fn EXTI15_10() {
// Interrupt Service Routine Code
}
Inside the ISR, first thing that needs to be done is modifying the G_DELAYMS delay. In this application, I chose to start with a delay of 2 seconds and decrease it in 0.5 second decrements. If the delay value reaches zero then I reset it again to 2 seconds. Though as before, to access G_DELAYMS, a critical section is needed. Additionally, I am using a new set method that allows me to modify the contents of G_DELAYMS.
cortex_m::interrupt::free(|cs| {
G_DELAYMS
.borrow(cs)
.set(G_DELAYMS.borrow(cs).get() - 500_u32);
if G_DELAYMS.borrow(cs).get() < 500_u32 {
G_DELAYMS.borrow(cs).set(2000_u32);
});
We are not done yet, as the interrupt pending flag for the button press in the hardware is still set. If it is not reset, then we won't be able to detect any subsequent interrupts. For that I would need a reference to the GPIO button peripheral which can be provided by the G_BUTTON global variable created earlier. As a result, in the same critical section started earlier the following lines can be added:
let mut button = G_BUTTON.borrow(cs).borrow_mut();
button.as_mut().unwrap().clear_interrupt_pending_bit();
The first line obtains a mutable reference to the Option in G_BUTTON using the borrow_mut method. In the following line, the mutable reference is unwrapped, providing access to the button handle. Finally, the clear_interrupt_pending_bit method from the ExtiPin traits is applied to clear the interrupt pending flag/bit.
Here is the full code for the implementation described in this post. You can additionally find the full project and others available on the The Embedded Rustacean STM32F4 git repo.
#![no_std]
#![no_main]
// Imports
use core::cell::{Cell, RefCell};
use cortex_m::interrupt::Mutex;
use cortex_m_rt::entry;
use panic_halt as _;
use stm32f4xx_hal::{
gpio::{self, Edge, Input},
pac::{self, interrupt},
prelude::*,
};
// Create an alias for pin PC13
type ButtonPin = gpio::PC13<Input>;
// Global Variable Definitions
// Global variables are wrapped in safe abstractions.
// Peripherals are wrapped in a different manner than regular global mutable data.
// In the case of peripherals we must be sure only one refrence exists at a time.
// Refer to Chapter 6 of the Embedded Rust Book for more detail.
// Create a Global Variable for the GPIO Peripheral that I'm going to pass around.
static G_BUTTON: Mutex<RefCell<Option<ButtonPin>>> = Mutex::new(RefCell::new(None));
// Create a Global Variable for the delay value that I'm going to pass around for delay.
static G_DELAYMS: Mutex<Cell<u32>> = Mutex::new(Cell::new(2000_u32));
#[entry]
fn main() -> ! {
// Setup handler for device peripherals
let mut dp = pac::Peripherals::take().unwrap();
// Configure and obtain handle for delay abstraction
// 1) Promote RCC structure to HAL to be able to configure clocks
let rcc = dp.RCC.constrain();
// 2) Configure the system clocks
// 8 MHz must be used for HSE on the Nucleo-F401RE board according to manual
let clocks = rcc.cfgr.use_hse(8.MHz()).freeze();
// 3) Create delay handle
let mut delay = dp.TIM1.delay_ms(&clocks);
// Configure the LED pin as a push pull ouput and obtain handle
// On the Nucleo FR401 theres an on-board LED connected to pin PA5
// 1) Promote the GPIOA PAC struct
let gpioa = dp.GPIOA.split();
// 2) Configure Pin and Obtain Handle
let mut led = gpioa.pa5.into_push_pull_output();
// Configure the button pin as input and obtain handle
// On the Nucleo FR401 there is a button connected to pin PC13
// 1) Promote the GPIOC PAC struct
let gpioc = dp.GPIOC.split();
// 2) Configure Pin and Obtain Handle
let mut button = gpioc.pc13;
// Configure Button Pin for Interrupts
// 1) Promote SYSCFG structure to HAL to be able to configure interrupts
let mut syscfg = dp.SYSCFG.constrain();
// 2) Make button an interrupt source
button.make_interrupt_source(&mut syscfg);
// 3) Make button an interrupt source
button.trigger_on_edge(&mut dp.EXTI, Edge::Rising);
// 4) Enable gpio interrupt for button
button.enable_interrupt(&mut dp.EXTI);
// Enable the external interrupt in the NVIC by passing the button interrupt number
unsafe {
cortex_m::peripheral::NVIC::unmask(button.interrupt());
}
// Now that button is configured, move button into global context
cortex_m::interrupt::free(|cs| {
G_BUTTON.borrow(cs).replace(Some(button));
});
// Application Loop
loop {
// Turn On LED
led.set_high();
// Obtain G_DELAYMS and delay
delay.delay_ms(cortex_m::interrupt::free(|cs| G_DELAYMS.borrow(cs).get()));
// Turn off LED
led.set_low();
// Obtain G_DELAYMS and delay
delay.delay_ms(cortex_m::interrupt::free(|cs| G_DELAYMS.borrow(cs).get()));
}
}
#[interrupt]
fn EXTI15_10() {
// Start a Critical Section
cortex_m::interrupt::free(|cs| {
// Obtain Access to Delay Global Data and Adjust Delay
G_DELAYMS
.borrow(cs)
.set(G_DELAYMS.borrow(cs).get() - 500_u32);
if G_DELAYMS.borrow(cs).get() < 500_u32 {
G_DELAYMS.borrow(cs).set(2000_u32);
}
// Obtain access to Global Button Peripheral and Clear Interrupt Pending Flag
let mut button = G_BUTTON.borrow(cs).borrow_mut();
button.as_mut().unwrap().clear_interrupt_pending_bit();
});
}
In this post, an interrupt-based LED control application was created leveraging the GPIO peripheral for the STM32F401RE microcontroller on the Nucleo-F401RE development board. All code was created at the HAL level using the stm32f4xx Rust HAL. It can be seen that doing interrupts in Rust can be a bit verbose for all the safe abstractions that are added. For that, one can instead resort to RTIC that can reduce much of the code and will be covered in a following post. Have any questions/comments? Share your thoughts in the comments below 👇.